Analýza mobilního laserového skenování ve stavebnictví
Mobilní laserové skenování (MLS) je v současné době běžně využíváno v řadě geodetických aplikací. Zpřesnění bodových mračen MLS se obvykle provádí zvyšováním počtu vlícovacích bodů (VB), které jsou rovnoměrně rozmístěné v rámci mapovaného území. Přesnost bodových mračen lze vylepšit také vícenásobnými průjezdy mobilního mapovacího systému (MMS). Cílem tohoto článku je navrhnout vhodný postup, kterým by bylo možné odstranit lokální deformace bodových mračen MLS. Navržený postup je založený na porovnání bodových mračen z vícenásobných průjezdů MMS. Do míst, kde rozdíly mezi bodovými mračny dosahují větších hodnot, jsou pak cíleně přidávány další VB.
1. Úvod
Technologie mobilního laserového skenování (MLS) je v současné době využívána pro široké spektrum geodetických aplikací. Mračna bodů, která jsou produktem MLS, nacházejí uplatnění zejména v dopravním stavitelství, vodním hospodářství, při mapování pro potřeby katastru nemovitostí a dalších aplikacích [1, 2]. Výsledná přesnost produktů, založených na bodových mračnech MLS, je závislá na mnoha faktorech – na kvalitě a přesnosti určení trajektorie MLS, počtu a konfiguraci vlícovacích bodů (VB), hustotě bodových mračen a na algoritmech použitých při zpracování.
Geometrickou přesnost mračen bodů lze zlepšit s využitím signalizovaných vlícovacích bodů [3] měřených během několika průjezdů mobilního mapovacího systému (MMS) [4]. Zvyšování počtu vlícovacích bodů vede k prodlužování procesu a zvyšování nákladů. Základním cílem je minimalizace počtu vlícovacích bodů při současném zachování přijatelné geometrické přesnosti výsledných bodových mračen.
Obecně existují dva základní přístupy pro testování geometrické přesnosti bodových mračen. První přístup je založený na přesné síti kontrolních bodů, jejichž souřadnice jsou porovnány se souřadnicemi těchto bodů, získanými z mračna bodů MLS. Druhý přístup je založený na porovnání mračna MLS s referenčním bodovým mračnem, které má lepší geometrickou přesnost a ideálně i větší hustotu než testované mračno. Referenční mračno může být vytvořeno například s využitím terestrického laserového skenování (TLS).
Porovnáním mračen z MLS a TLS se zabývali Johnson et al. [5], kteří určovali přesnost 4 komerčních MMS. Přesnost výsledných bodových mračen dosahovala hodnoty ±80 mm v horizontální složce souřadnic a ±50 mm ve složce vertikální. Tyto hodnoty jsou uvedeny jako intervaly 95% spolehlivosti, tedy příslušné násobky směrodatných odchylek t×σ [6]. Podobné testování přesnosti MLS provedli i Fryskowska a Wróblewski [7], kteří porovnávali rozměry geometrických parametrů stavebních prvků (např. hran střech). Odhad přesnosti činil ±60 mm v horizontální složce souřadnic a ±42 mm ve složce vertikální (zde jsou uváděny jednonásobky směrodatných odchylek 1×σ).
Zásadní vliv na přesnost výsledných bodových mračen má i přesnost určení trajektorie MMS. Špatné podmínky pro pozorování družic Globálních navigačních satelitních systémů (GNSS), ke kterým dochází zejména při mapování ve městech a zalesněných oblastech (zákryty oblohy budovami a stromy), významně zhoršují kvalitu výsledné trajektorie MMS [8]. Kvalitu trajektorie vypočtené z dat GNSS pomáhají vylepšovat také data z inerciální měřicí jednotky (IMU) a z odometru (DMI). Správný plán nájezdu MMS a kontrola kvality GNSS dat jsou vhodnými nástroji pro odhad kvality trajektorie MMS.
Cílem tohoto článku je navrhnout vhodný postup, pomocí kterého bude možné odstranit lokální deformace bodových mračen, které vznikají díky nepřesnostem částí trajektorie MMS.
2. MMS RIEGL VMX-450
MMS RIEGL VMX-450 (Obr. 1) je modulární systém skládající se v základní konfiguraci ze dvou laserových skenerů RIEGL VQ-450, čtyř modulárních kamer RIEGL VMX-450-CS6, GNSS přijímače, IMU, odometru RIEGL VMX-450-DMI a řídicí jednotky RIEGL VMX-450-CU. MMS je doplněn o panoramatickou kameru Point Grey ladybug5. Vybrané parametry systému jsou uvedeny v Tab. 1.


Obr. 1: MMS RIEGL VMX-450
Absolutní polohová a úhlová přesnost deklarovaná výrobcem je splnitelná pouze za předpokladu dobrých podmínek pro měření GNSS (minimální výpadky signálu), využití dat z DMI a při užití metody dvojitých diferencí (připojení na referenční stanici, případně síť permanentních stanic GNSS). Hodnoty relativní polohové přesnosti v Tab. 1 odpovídají situaci, kdy je vzdálenost mezi sousedními VB maximálně 100 m.
| Senzor | Název parametru | Hodnota parametru |
|---|---|---|
| VQ-450 | Princip měření | doba letu paprsku |
| Maximální rychlost pulsů | 1,1 MHz (2 × 550 kHz) | |
| Maximální rychlost otáček zrcadla | 400 otáček/s | |
| Vnější přesnost | 8 mm (1×σ na vzdálenost 50 m) | |
| Vnitřní přesnost | 5 mm (1×σ na vzdálenost 50 m) | |
| GNSS/IMU | Absolutní polohová přesnost | 0,02–0,05 m (1×σ) |
| Relativní polohová přesnost | 0,01 m (1×σ při vzdálenostech sousedních VB < 100 m) | |
| Úhlová přesnost (roll, pitch) | 0,005° (1×σ) | |
| Úhlová přesnost (yaw) | 0,015° (1×σ) |
3. Pořízení a zpracování dat
Data MMS byla pořízena s využitím dvou 600 m dlouhých protisměrných průjezdů při rychlosti vozidla 20 km/h. Mapovaná oblast měla rozměry přibližně 190 × 90 m. Výšková členitost území (včetně budov) dosahovala hodnoty 20 m. Data MLS byla pořizována při frekvenci 1,1 MHz. Trajektorie MMS byla zpracována s využitím programu Applanix POSPac. Kinematická GNSS data byla zpracována metodou dvojitých diferencí s připojením na síť permanentních GNSS stanic CZEPOS. Do výpočtu trajektorie byla zahrnuta i data z IMU a DMI.
Zpracování dat MLS bylo provedeno v programu RIEGL RiPROCESS. Zpracování v RiPROCESS se skládá z konverze dat, generování mračen bodů a transformace mračen bodů s využitím vlícovacích bodů. V prvním kroku byla vytvořena bodová mračna MLS na základě trajektorie z Applanix POSPac. Následně byly v těchto mračnech manuálně identifikovány rovnoměrně rozmístěné VB v několika variantách:
- 6 VB (vzdálenost mezi body do 100 m v souladu s doporučením výrobce; viz Tab. 1),
- 10 VB,
- 13 VB (vzdálenost mezi body 50 m; dvojnásobná hustota VB oproti variantě 6 VB),
- 6+2 VB (6 rovnoměrně rozmístěných VB + 2 VB cíleně přidané do problematických oblastí, viz kap. 3).
Použité VB jsou součástí testovacího pole, které má významně vyšší přesnost, než je očekávaná přesnost výsledků MLS. Odhad hodnoty prostorové směrodatné odchylky VB s3D = ±2,0 mm [10]. Zpřesnění trajektorie MMS na základě vlícování bylo provedeno s využitím modulu RiPRECISION. Výsledkem zpracování byla dvě bodová mračna (ze dvou protisměrných průjezdů MMS), přičemž každé z nich obsahovalo přibližně 123 000 000 bodů.



Obr. 2: Konfigurace 6 VB (vlevo), 10 VB (uprostřed), 13 VB (vpravo)
Referenční TLS mračno bylo vytvořeno na základě měření dvěma pozemními laserovými skenery Faro Focus3D X 130. Referenční TLS mračno bylo vlícováno na body testovacího pole. Odhad hodnoty prostorové směrodatné odchylky referenčního TLS mračna s3D = ±8,5 mm. Filtrace mračen MLS a následné porovnání s referenčním mračnem TLS bylo provedeno v programu CloudCompare v2.11.
Nejdříve byla porovnána mračna z prvního a druhého průjezdu MMS mezi sebou, poté každé zvlášť s referenčním TLS mračnem. Do 2 problematických oblastí, identifikovaných ve variantě s 6 VB (vzdálenost mezi VB 100 m), byly cíleně přidány 2 VB (viz kap. 3). Následně byla mračna z prvního a druhého průjezdu MMS spojena a porovnána s referenčním TLS mračnem. Provedena byla i kontrola kvality (QC) GNSS dat s využitím software G-Nut / Anubis [11].
Veškerá porovnání bodových mračen a následné analýzy jejich přesnosti byly řešeny pouze ve vertikální složce souřadnic. Pro jednotlivé varianty byly vypočteny globální charakteristiky přesnosti v podobě odhadů vertikální směrodatné odchylky sv (konfidenční interval 68 %). Dále byly podle [10] jednotlivé varianty testovány na relativní četnost výskytu vybočujících (5% kritická hodnota) a odlehlých (1% kritická hodnota) hodnot rozdílů. Zvlášť byla testována přesnost i ve 2 identifikovaných problematických oblastech.
4. Výsledky
V následujících obrázcích jsou vizualizovány vertikální složky rozdílů mezi mračny. Obr. 3 znázorňuje porovnání mračna z prvního průjezdu s mračnem z druhého průjezdu MMS ve variantě 6 VB (vzdálenost VB nepřekročila 100 m dle doporučení výrobce viz kap. 2). V Obr. 3 lze identifikovat dvě oblasti s významnými rozdíly mezi mračny. Porovnání bodových mračen z prvního a druhého průjezdu MMS s referenčním TLS mračnem je znázorněno na Obr. 4. Z obrázku je patrné, že k deformacím mračna (tedy nepřesnostem v trajektorii MMS) došlo zejména během druhého průjezdu MMS.

Obr. 3: Rozdíly bodových mračen ze dvou protisměrných průjezdů MMS

Obr. 4: Rozdíl referenčního TLS mračna a mračna MLS z prvního (nahoře) a druhého (dole) průjezdu
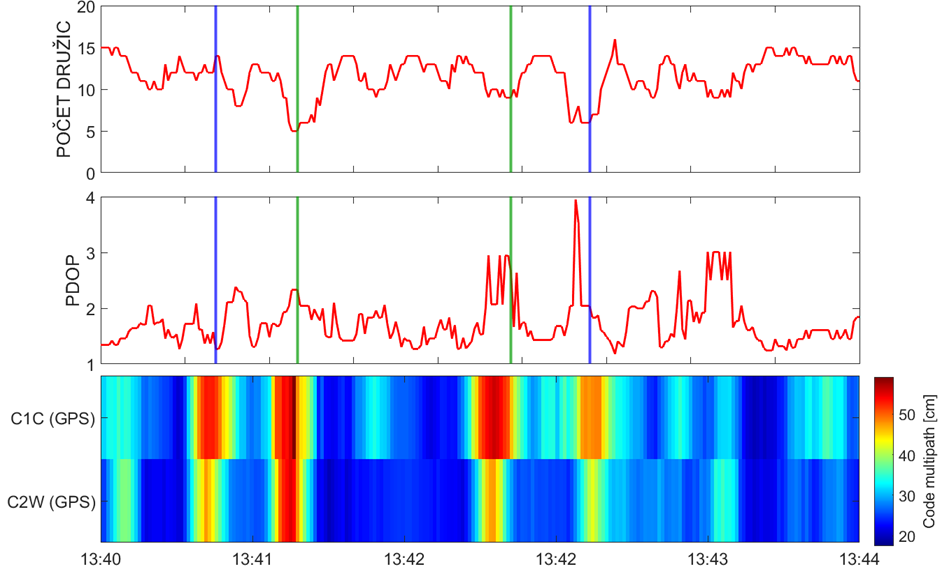
Obr. 5: Vybrané výsledky QC: počet družic (nahoře), PDOP (uprostřed), multipath (dole)
Vybrané výsledky QC z G-Nut / Anubis znázorňuje Obr. 5. Svislé čáry v Obr. 5 jsou v částech trajektorie, které odpovídají problematickým oblastem v mračnech MMS (v Obr. 4 jsou označeny šipkami odpovídající barvy). V těchto částech trajektorie došlo ke značnému poklesu počtu družic a nárůstu hodnoty PDOP. Zároveň významně vzrostla hodnota multipath (tj. chyby v měřeních GNSS vznikající v důsledku odrazu signálů od objektů).
Porovnání bodových mračen z prvního a druhého průjezdu MMS s referenčním TLS mračnem ve variantě 6+2 VB je znázorněno na Obr. 6. Z tohoto obrázku je patrné, že díky cílenému přidání jednoho VB do každé inkriminované oblasti (celkem 2) byly odstraněny lokální deformace, kterými trpělo mračno z druhého průjezdu MMS.
Porovnání výsledných bodových MLS mračen z variant 6+2 VB (vzdálenost mezi body 100 m), 10 VB a 13 VB (vzdálenost mezi body 50 m) s referenčním TLS mračnem je zobrazeno na Obr. 7.

Obr. 6: Porovnání referenčního TLS bodového mračna a bodového mračna MLS z prvního (nahoře) a druhého (dole) průjezdu po přidání 2 VB

Obr. 7: Porovnaní referenčního TLS bodového mračna s bodovými MLS mračny vlícovanými na 6+2 VB (nahoře), 10 VB (uprostřed) a 13 VB (dole)
Globální charakteristiky přesnosti výsledných bodových mračen z jednotlivých variant v podobě odhadů hodnot vertikálních směrodatných odchylek a relativních četností vybočujících a odlehlých hodnot rozdílů jsou uvedeny v Tab. 1. Procentuální zastoupení vybočujících/odlehlých hodnot z jednotlivých variant, které připadají do 2 identifikovaných problémových oblastí (viz Obr. 4) je uvedeno v Tab. 3.
| Varianta | sV [mm] | ||
|---|---|---|---|
| Sv | % vybočujících | % odlehlých | |
| 6 VB | 8,4 | 2,8 | 2,1 |
| 6+2 VB | 7,1 | 2,1 | 1,3 |
| 10 VB | 8,2 | 2,6 | 1,7 |
| 13 VB | 7,9 | 2,5 | 1,5 |
| Varianta | OBLAST 1 | OBLAST 2 | ||
|---|---|---|---|---|
| % vybočujících | % odlehlých | % vybočujících | % odlehlých | |
| 6 VB | 28,1 | 44,4 | 23,0 | 36,7 |
| 6+2 VB | 7,0 | 2,7 | 4,1 | 1,3 |
| 10 VB | 13,4 | 20,3 | 9,2 | 14,3 |
| 13 VB | 6,2 | 1,3 | 4,1 | 1,1 |
5. Závěr
Špatné observační podmínky GNSS mohou způsobovat chyby v trajektorii MMS a následně lokální deformace v mračnech MLS. Použití vlícovacích bodů významně zlepšuje přesnost výsledků MLS. Nárůst počtu VB vede k větší časové a ekonomické náročnosti procesu, plošné zvyšování hustoty VB se tudíž nejeví jako optimální.
Z testování vyplývá, že výsledná přesnost mračna MLS ani při extrémní hustotě rovnoměrně rozložených VB (dvojnásobek doporučení výrobce) není vyšší, než přesnost mračna s hustotou vlícovacích bodů dle doporučení výrobce a cíleně přidanými VB pouze do oblastí, kde vlivem špatných GNSS podmínek došlo k deformacím mračen MLS.
Odstranění deformací u variant rovnoměrně rozmístěných VB (10, 13) je závislé na tom, jak daleko se nachází nejbližší vlícovací bod od deformované oblasti.
Jako optimální se jeví rovnoměrné vlícování v souladu s pokyny výrobce (vzdálenost mezi VB < 100 m) společně s provedením minimálně 2 protisměrných průjezdů MMS. Porovnání bodových mračen z jednotlivých průjezdů MMS pak může indikovat místa vhodná k dovlícování dalšími VB. Jako přidávané VB pak mohou být vybrány i vhodné přirozené objekty, které jsou dobře identifikovatelné v bodových mračnech TLS. Cílené přidání VB do identifikovaných problematických oblastí může významně zvýšit zejména lokální přesnost bodových mračen MLS bez významného navýšení nákladů celé zakázky.
6. Literatura
- AL-BAYARI, Omar. Mobile mapping systems in civil engineering projects (case studies). Applied Geomatics. 2019, 11(1), 1-13. ISSN 1866-9298. Dostupné z: https://doi.org/10.1007/s12518-018-0222-6
- WANG, CH et al. A Survey of Mobile Laser Scanning Applications and Key Techniques over Urban Areas. Remote Sensing. 2019, 11(13). ISSN 2072-4292. Dostupné z: https://doi.org/10.3390/rs11131540
- SCHAER, P.; VALLET J. Trajectory Adjustment of Mobile Laser Scan Data In GPS Denied Enviroments. ISPRS – International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences. 2016, XL-3/W4, 61-64. ISSN 2194-9034. Dostupné z: https://doi.org/10.5194/isprsarchives-XL-3-W4-61-2016
- NOLAN, J. et al. Multi-Pass Approach for Mobile Terrestrial Laser Scanning. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences. 2015, II-3/W5, 105-112. ISSN 2194-9050. Dostupné z:
https://doi.org/10.5194/isprsannals-II-3-W5-105-2015 - JOHNSON, S. D. et al. Laser mobile mapping standards and applications in transportation: Joint Transportation Research Program Publication No. FHWA/IN/JTRP-2016/01. Purdue University, 2016. Dostupné z:
https://doi.org/10.5703/1288284316164 - HAMPACHER, M.; ŠTRONER, M. Zpracování a analýza měření v inženýrské geodézii. Vydání druhé, upravené a doplněné. Praha: České vysoké učení technické v Praze, 2015. ISBN 978-80-01-05843-5.
- FRYSKOWSKA, A.; WRÓBLEWSKI P. Mobile Laser Scanning accuracy assessment for the purpose of base-map updating. Geodesy and Cartography. 2018, 67(1), 35-55. Dostupné z: https://doi.org/10.24425/118701
- HUSSNAIN, Z. el al. Enhanced trajectory estimation of mobile laser scanners using aerial images. ISPRS Journal of Photogrammetry and Remote Sensing [online]. 2021, 173, 66-78. ISSN 09242716. Dostupné z:
https://doi.org/10.1016/j.isprsjprs.2021.01.005 - Riegl Laser Measurement Systems GmBH, RIEGL VMX-450: Compact Mobile Laser System, Data Sheet, 2015.
- KALVODA, P. et al. Accuracy Evaluation and Comparison of Mobile Laser Scanning and Mobile Photogrammetry Data. IOP Conference Series: Earth and Environmental Science. 2020, 609. ISSN 1755-1315. Dostupné z:
https://doi.org/10.1088/1755-1315/609/1/012091 - VACLAVOVIC, P.; DOUSA, J. G-Nut/Anubis: Open-Source Tool for Multi-GNSS Data Monitoring with a Multipath Detection for New Signals, Frequencies and Constellations. RIZOS, Chris a Pascal WILLIS, ed. IAG 150 Years. Cham: Springer International Publishing, 2016, 2015-5-7, s. 775–782. International Association of Geodesy Symposia. ISBN 978-3-319-24603-1. Dostupné z: https://doi.org/10.1007/1345_2015_97
Poděkování
Článek vznikl v rámci řešení projektu Specifického výzkumu VUT v Brně FAST-S-21-7484.
Článek je aktuální, dobře zpracovaný, prospěšný nejenom pro samotnou geodézii, ale pro celou oblast stavebnictví a vodního hospodářství. Doporučuji k vydání.
Mobile laser scanning (MLS) is currently commonly used in many surveying applications. The refinement of MLS point clouds is usually done by increasing the number of control points (CP) equally distributed within the mapped area. The accuracy of point clouds can also be improved by multiple passes of the mobile mapping system (MMS). This paper deals with the proposal of a suitable procedure by which it would be possible to remove local deformations of MLS point clouds. The proposed approach is based on the comparison of point clouds from multiple MMS passes. Additional CPs are then added to the places where the more significant differences between the point clouds.