Diagnostika stavebných objektov metódou mobilného 3D skenovania
Príspevok je orientovaný na zhodnotenie možností využitia diagnostiky stavebných objektov a výstupov procesu mobilného 3D skenovania existujúcich objektov a ich úpravy prostredníctvom softvérovej transformácie do prostredia BIM (Building Information Modeling). Dôraz je kladený na problematiku vytvárania informačného modelu stavebného objektu na základe point cloudu určeného mobilným 3D mapovaním. Hlavným cieľom bolo spracovanie nameraných dát mobilného mapovania, realizácia úkonov importu týchto dát do programového prostredia Autodesk Revit a vytvorenie BIM modelu. Pridruženým cieľom bolo porovnanie výsledného objektu pochádzajúceho z point cloudu s existujúcou projektovou dokumentáciou. Zhodnotenie celého procesu prostredníctvom SWOT analýzy predstavuje záver príspevku.

© Fotolia.com
Článek byl oceněn a vydán v rámci 21. ročníku odborné konference doktorského studia Juniorstav.
1 Úvod
Priemysel, ako aj celé životné prostredie človeka je do citeľnej miery poznačené integráciou moderných a inovatívnych technológií, pričom stavebníctvo ako významná súčasť hospodárstva rozvíjajúcich sa krajín EÚ, nemôže byť výnimkou. Najmä z titulu značnej miery senzitivity, ktorú bolo možné zachytiť v krízovom období, je nutné si uvedomiť skutočnosť, že budúcimi faktormi žiaducej miery konkurencieschopnosti odvetvia je návrh a zavádzanie nástrojov, ktoré v sebe integrujú kroky systematického manažérskeho riadenia, prihliadania na efektívne ekonomické prístupy a v neposlednom rade integráciu pokročilých technických a technologických procesov. Do tejto skupiny procesov je možné zaradiť napr. zavádzanie metód spracovania investície (realizácie stavebnej zákazky) prepájajúcich využitie pokročilej technológie získavania nevyhnutných iniciačných údajov (dátových vstupov) formou 3D laserového skenovania jestvujúceho stavu objektov a pokročilé softvérové riešenia z prostredia BIM (Building Information Modeling) ako nástroja pre spracovanie takto získanej dokumentácie.
Aplikácia daného postupu predstavuje východisko pre následné a príbuzné aktivity spojené s realizáciou nevyhnutných častí stavebného investičného zámeru, akými sú napr. projekcia, ocenenie stavebnej zákazky alebo tzv. „Facility management“.
Na tomto mieste je vhodné uviesť, že aplikácia 2D a 3D laserového skenovania bola a stále je veľmi populárna v geografických a geodetických činnostiach, avšak v prepojení s BIM nástrojmi dostáva táto technológia v prostredí stavebníctva nový rozmer a význam. Jedným z významných dôvodov prečo presadzovať BIM systémy vo svete je aj snaha o redukciu nákladov spojených s realizáciou stavebných projektov. V spolupráci s aktivitami spočívajúcimi v digitálnom spracovaní dát umožňuje rýchlu manipuláciu s informáciami, eliminuje riziká spojené s možnosťami vzniku chýb spôsobených napríklad zlým zápisom, náčrtom alebo nepravdivou interpretáciou zápisu v rámci spolupráce medzi vykonávateľom meraní in situ a spracovateľom 3D modelu.
2 Diagnostika stavebných objektov
Využívanie kompletných údajov získaných pomocou nedeštruktívnej diagnostiky je hlavným zdrojom vstupných informácií pre analýzu stavu stavebných objektov, vyhodnotenie a včasné návrhy opatrení, ktoré zabezpečia dodržanie alebo predĺženie životnosti stavebných objektov. Spracované výsledky sú vhodným základom pre plánovanie a efektívne rozmiestnenie prostriedkov – vzniká súvislosť medzi disponibilnými prostriedkami (údržba, opravy) a kvalitou daných objektov. Zavedenie zberu údajov pomocou nedeštruktívnej diagnostiky vedie k celkovej objektivizácií v rozdeľovaní prostriedkov zároveň ovplyvňuje kvalitu stavebných objektov.
Mobilný 3D skenovanie – mobilný mapovací systém MMS
Laserové skenovanie je v súčasnej dobe najmodernejšia a bezkonkurenčne najefektívnejšia metóda diagnostiky a hromadného zberu presných priestorových dát. Veľkou výhodou je zameranie obrovského množstva bodov za krátky čas a možnosť merania aj v ťažko prístupných priestoroch. Laserový skener využíva pulzovú laserovú technológiu. Výstupom je mračno bodov – stovky miliónov bodov s priestorovými súradnicami. Ku každému bodu môžu byť priradené aj informácie o farbe a intenzite. Takouto metódou získané virtuálne modely vykazujú minimálnu stratu informácií o svojich rozmeroch a tvaroch. [1] [2]
Mobilný mapovací systém (MMS) je vo svojej podstate nedeštruktívna diagnostika, ktorá umožňuje bezkontaktné určenie priestorových súradníc bodov, prostredníctvom senzorov a príslušného vyhodnocovacieho softvéru, ktoré sú súčasťou vozidla Lynx SG1. Mobilný laserový skener je schopný zhromaždiť obrovské množstvo bodov až 1,26 bodov/sekunda (tzv. mračno bodov, resp. point cloud Obr. 1 vpravo) s minimálnym rozstupom vo veľmi krátkom čase. Prostredníctvom kamery sú počas skenovania získané tiež digitálne fotografie, na základe ktorých je možné jednotlivým bodom priradiť ich reálnu farbu. Výstupom skenovania teda môže byť mračno bodov s vysokou hustotou, alebo 3D model v reálnych farbách umiestnený v požadovanom súradnicovom systéme. [3]
Mobilné skenovanie alebo inými slovami – mobilné mapovanie všeobecne spočíva v zhromažďovaní údajov pomocou mobilného mapovacieho zariadenia, spracovaní nameraných údajov (tzv. post-processing) a následnom spracovaní mračna bodov (tzv. point cloud processing). Pre zhromažďovanie údajov v teréne kombinuje mobilné mapovacie zariadenie viacero technológií naraz (zariadenie LiDAR, globálny navigačný satelitný systém, inerciálne meracie jednotky a jednotku merania vzdialenosti).
Výsledkom diagnostiky a zberu dát v teréne prostredníctvom mobilného mapovacieho systému sú teda údaje z GNSS antén namontovaných na vozidle, observačné údaje zo základnej (statickej) stanice GNSS, dáta z jednotiek IMU a DMI, taktiež údaje z fotografií získaných prostredníctvom digitálnych kamier a mračno bodov. Všetky tieto dáta slúžia ako vstupné údaje pre následné spracovanie tzv. post-processing. Pod pojmom post-processing máme na mysli ďalšie spracovanie a zdokonalenie nameraných údajov. Výsledkom je mračno bodov (point cloud – Obr. 1 vpravo) umiestnené vo vybranom súradnicovom systéme, ktoré má informácie o farbe, polohe, výške a intenzite každého bodu. Následné spracovanie zahŕňa klasifikáciu mračna bodov podľa zvolených kritérií (napr. intenzita odrazu, farba bodov, nadmorská výška). Je to dôležitý proces, pri ktorom je možné použitím vhodných nástrojov oddeliť jednotlivé prvky v mapovanej oblasti (vegetácie, stromy, budovy, elektrické vedenia a pod.). V závislosti od požadovaných výsledkov z mobilného mapovania je možné následne vektorizovať mračno bodov (napr. terénne okraje, budovy) pomocou modelovania jednotlivých objektov alebo vykonať analýzy v aplikáciách GIS. [3] [4]
3 Diagnostika 3D mobilným skenovacím systémom
Pred samotným začatím mapovania bolo nutné sa uistiť, že prognóza počasia predpovedá dobré jazdné vlastnosti a atmosférické podmienky pre meranie, ktoré zahŕňajú napríklad teplotu ovzdušia v rozmedzí −10 ̊C až +40 ̊C, však v prípade ak sú kamery vypnuté môže Lynx pracovať aj pri teplotách −20 ̊C, minimálne množstvo zrážok (dážď, krúpy, sneh, hmla) a takisto vhodné atmosférické podmienky bez znečistenia oparom, dymom a pod. Pri mapovaní bol využívaný skener mobilný – Obr. 1 vľavo (a z toho dôvodu bolo nutné vykonať obhliadku budovy, aby bol zabezpečený voľný a plynulý prechod automobilu okolo celého stavebného objektu.


Obr. 1 Mobilný skener počas merania Hospodárskeho bloku ŽU (vľavo), point cloud objektu (vpravo)
Pred vykonaním samotnej diagnostiky je potrebné ponechať mobilný skener zamerať svoju polohu 5 minút staticky (stojace vozidlo) a 5 minút dynamicky (dynamická jazda s vozidlom), čím sa zamerajú na základe GPS (Global Positioning System), POS (Position Orientation System) a IMU (Inertial measurement unit) presné geografické údaje o polohe. [2] [4]

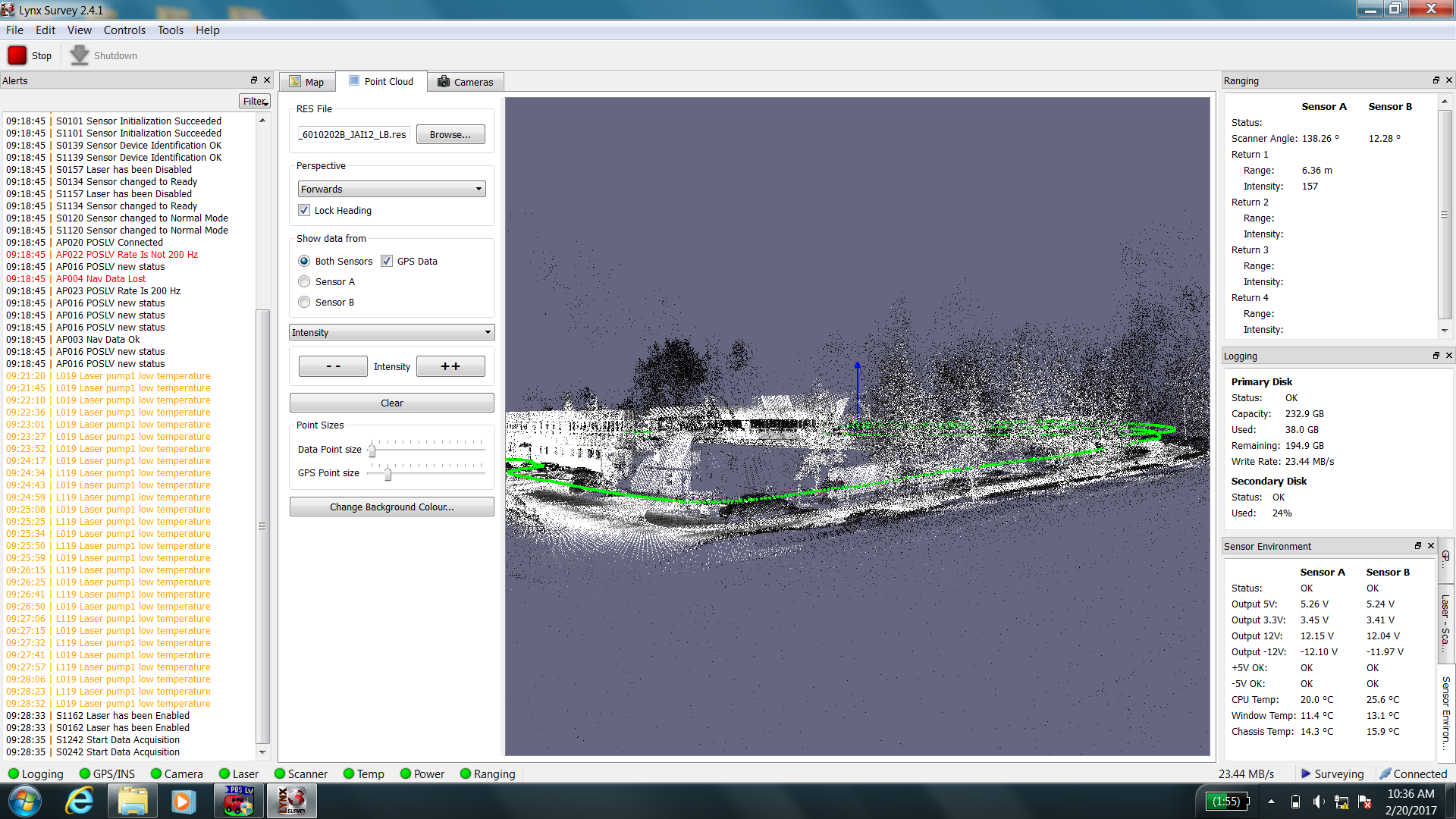
Obr. 2 Sledovanie zberu dát (vľavo), aktuálne zobrazenia nameraných dát (vpravo) počas jazdy vozidlom
Pri jazde s vozidlom Lynx a počas zberu dát je nutné sledovať systém pre maximalizáciu kvality (Obr. 2). Monitorovaním systému počas prieskumu je možné predísť zlyhaniu systému, strate dát, prípadne zlepšiť zber a presnosť dát. Po ukončení jazdy diagnostickým vozidlom je nutné ponechať prístroje zbierať dáta ešte 10 minút staticky na mieste, kde nie sú prekážky k oblohe pre lepšiu koordináciu lokalizačných systémov.


Obr. 3 Porovnanie neorezaného a orezaného mračna bodov
Post-processing point cloudu (Obr. 3), zabezpečuje zdokonalenie nameraných dát. Odstráni sa niekoľko miliónov bodov a tým sa mračno bodov stáva prehľadnejšie pre následné modelovanie a zároveň má súbor aj menšiu veľkosť, čo sa prejaví pri modelovaní v programe jeho rýchlejšou odozvou na príkazy, ktoré sú programu zadávané. Nasledoval proces modelovania stavebného objektu v softvérovom prostredí Autodesk Revit. [5] BIM modelovanie je praktické pre celkovú výstavbu a uľahčuje monitoring problematických častí stavby v čase prevádzky. Napomáha správcom stavebných objektov zostavovať finančný plán z hľadiska budúcich výdavkov na opravy a tým lepšie plánovať celkovú správu objektov. Je to dôležitý nástroj pre tzv. Life cycle assessment, kde môže byť nápomocný pri optimalizácií životného cyklu objektu pri matematickom analytickom riešení v kombinácií s experimentálnym overením fyzikálnych, mechanických a únavových charakteristík. [6] Výrobcovia stavebných prvkov alebo technologických zariadení riešia otázku, či, kedy a akým spôsobom nastúpiť do BIM. V prípade výrobcov to obvykle znamená poskytnúť portfólio svojich výrobkov stavebným projektantom vo forme 3D modelov s pridruženými informáciami. Vzniká konkurenčná výhoda v zmysle, že šanca zapracovania práve ich produkt bude v stavebnom projekte je vyššia, pretože projektant dostane hotový model, ktorý môže do projektu jednoducho vložiť namiesto toho, aby sa obťažoval s jeho vytváraním. [7]
Skenovanie je potom vhodné využiť pri dokumentovaní nepravidelných objektov ako sú sochy reliéfy, archeologické nálezy pretože zachytáva celý objekt s zvolenou mierou detailov. Z uvedených štúdií bolo zistené, že fotogrametria a skenovanie sú metódy, ktoré na seba skôr nadväzujú a ich kombinácia môže vyriešiť množstvo problémov, ktoré sa pri použití technológií jednotlivo vyriešiť nedajú. [8]
Následne sa využili namerané dáta a zrealizovalo sa porovnanie naskenovaných údajov (skutočného stavu) s reálnou dokumentáciou. Výsledkom bolo zistenie nedokonalostí v projektovej dokumentácií, ktoré uvádzam v nasledujúcom Obr. 4:


Obr. 4 Porovnanie point cloudu s projektovou dokumentáciou – stĺpy (vľavo), okno (vpravo)
Z uvedených príkladov je zjavné, že porovnanie projektovej dokumentácie a point cloudu má veľké uplatnenie. Napríklad pri kolaudácií alebo kontrole kvality v rámci kontrolného stavebného merania, kde je možné rýchlo a jednoducho zistiť nezrovnalosti, ktoré vznikli počas výstavby medzi skutočným stavom stavby a výkresovou dokumentáciou. V nasledujúcej kapitole sa autor venuje kompletizovaniu vnútorných silných a slabých stránok a vonkajších príležitostí a hrozieb predstavenej problematiky a to prostredníctvom SWOT analýzy, ktorá je využívaná ako základný nástroj na vyhodnotenie súčasného stavu problematiky z rôznych hľadísk.
4 Posúdenie procesu pomocou SWOT analýzy
V rámci SWOT analýzy (Tab. 1) je zhodnotený celý proces spracovaný v príspevku. SWOT analýza je základným nástrojom, ktorý sa používa na vyhodnotenie súčasného stavu z rôznych hľadísk, a to z hľadiska silných a slabých stránok, príležitosti a ohrození. Zároveň načrtáva možné alternatívy budúceho vývoja, možnosti na ich využitie, prípadne ich riešenie. SWOT analýza je vlastne kombináciou analýzy O-T a S-W. O-T analýza predstavuje vonkajšiu – externú analýzu, zameriavajúcu sa najmä na vonkajšie prostredie (príležitosti a ohrozenia). S-W analýza predstavuje vnútornú – internú analýzu, v ktorej ide o rozbor vnútorných faktorov problematiky. [9]
| O – OPPORTUNITIES PRÍLEŽITOSTI | T – THREATS OHROZENIA |
|
|
| S – STRENGHTS SILNÉ STRÁNKY | W – WEAKNESSES SLABÉ STRÁNKY |
|
|
Nepostačuje iba identifikácia jednotlivých silných a slabých stránok alebo príležitostí a hrozieb, pretože tým vzniká len zoznam položiek, ktorý neobsahuje ďalšie riešenie situácie. Preto je potrebné jednotlivé položky zoznamu rozanalyzovať a ohodnotiť ich vplyv na proces ako celok. Najlepšie prednosti sú také, ktoré sú špecifické a je zložité ich určitým spôsobom napodobniť, čím v podstate vytvárajú konkurenčnú výhodu. Pre prípad príspevku, kde bol riešený proces získania, transformácie a využitia nameraných dát (reprezentovaných point cloudom) v prostredí BIM je možné jednoznačne uviesť, že v celom procese prevládajú najmä pozitívne stránky. Kritické miesta je potrebné eliminovať na minimum, keďže bránia aktivitám a efektívnemu výkonu. Pre tento prípad je možné slabé stránky eliminovať procesom riadenia rizík, prípadne kontinuálnym investovaním do ľudských zdrojov, ktoré budú dané procesy realizovať. Aj napriek prevládajúcim pozitívam nad negatívami, boli pri spracovaní zistené aj určité slabé stránky v riešenej oblasti a to v spojitosti napríklad s využitím 3D mobilného laserového skenera na pozemné stavby. Je potrebné prihliadať nato aby výškový dosah lasera bol pre meraný objekt dostačujúci. Z uvedeného vyplýva, že výhodnejšie je využívať mobilný skener pri mapovaní líniových stavieb, kde dokonca ani nie je nutné obmedziť premávku tzn. že meranie je možné vykonávať za plnej prevádzky komunikácie. Pri vyhotovovaní informačného modelu budovy (Obr. 5) je dôležité dokonale poznať softvér, v ktorom informačný model bude vytvorený, aby bolo možné využiť všetky výhody, ktoré softvér ponúka a tým model posunúť na vyššiu úroveň, pričom môže byť zabezpečené priaznivé zachovanie energií a prostredia a podpora užívateľov k produktívnej práci počas celej životnosti budovy.


Obr. 5 Pohľad na výsledný BIM model bez mračna bodov (vľavo), s mračnom bodov (vpravo)
5 Záver
Príspevok prehľadnou formou poukazuje na výhody a nevýhody inovatívnych technológií a ich využitia v prostredí stavebného odvetvia, a to s orientáciou na princípy BIM prepojené s možnosťami získavania vstupných dát prostredníctvom 3D mapovania objektov.
Príspevok je venovaný problematike BIM (Building Information Modeling) ako revolučného spôsobu realizácie vybraných úkonov v rámci prípravy, výstavby a správe budov (Facility managementu) a terestriálnemu laserovému skenovaniu, ktoré je výnimočné svojou rýchlosťou, presnosťou a množstvom zbieraných dát. Je to všeobecne využívaná metóda zberu dát, ktorá je rýchla a dáta môžu byť veľmi podrobné.
Súbežne sa spracoval strategický prehľad SWOT, ktorý poukazuje na niekoľko zaujímavých faktov, ďalej je poukázané na ostatné možnosti využitia laserového skenovania a informačného modelovania budov. Point cloud poslúžil na porovnanie existujúcej projektovej dokumentácie, teda na odhalenie možných odchýlok skutočného (reálneho) stavu budov od výkresovej dokumentácie.
Medzi zaujímavé zistenia je možné zaradiť aj skutočnosť, že slovenskom trhu existuje „diera“ v danom odvetví spojenom s využitím BIM a 3D skenovania objektov. Stavebné firmy pristupujú aj napriek jestvujúcim benefitom k využitiu daných prístupov skepticky a odkladajú aktivity spojené s ich postupným zavádzaním do svojho manažérskeho prostredia. A to aj napriek skutočnosti, že by si tým zabezpečili vyššiu mieru konkurencieschopnosti voči ostatným subjektom na trhu.
Záverom je možné uviesť, že vďaka stále aktuálnejším a silnejúcim požiadavkám na efektívnosť a komplexnosť realizácie vybraných procesov riadenia stavebnej zákazky, bude v krátkodobom horizonte nevyhnutne kladený stále väčší dôraz na využívanie nástrojov a princípov budovaných na myšlienke informačného modelovania budov (BIM). Pri správnej aplikácii nástrojov určených na kreovanie informačného modelu stavby je možné docieliť jednoznačné procesné a ekonomické benefity, ktoré umožnia nielen získavať komplexné dáta o predmetnej stavbe, ale taktiež pristupovať k riadeniu procesu správy objektov vo všetkých fázach ich životného cyklu. Taktiež je možné uviesť, že dané prínosy prevyšujú v konečnom dôsledku hlavnú nevýhodu BIM prístupov, ktorým je vyššia počiatočná investícia spojená so zabezpečením samotných produktov BIM (licencií a IKT vybavenia), ako aj s nutnosťou akceptovať zvýšené náklady určené na preškolenie personálu určeného na prácu s danými aplikáciami.
Poďakovanie
Tento príspevok bol vypracovaný s podporou projektu „Výskumné centrum Žilinskej univerzity – ITMS 26220220183“.
Použité zdroje
- NAVRÁTIL, R. Technologie skenovaní ve 3D [online, prístupné dňa 23. 5. 2017].
- VAŇÁK, P. 2016. BIM Pilot # 01:mračna bodů nejsou model! [online, prístupné dňa 2. 10. 2018]. Dostupné na internete: https://www.bimpilot.cz/single-post/2016/05/03/BIM-Pilot-01-mra%C4%8Dna-bod%C5%AF-nejsou-model
- Baudelet, M. a kol. 2014. Laser Spectroscopy for Sensing: undamentals, Techniques and Applications. Elsevier.: Cambridge. 2014. ISBN 978-0-85709-273-1
- TAO, C. V. – Li, J. 2007. Advances in mobile mapping technology. Vol 4. International Society for Photogrammetry and Remote Sensing book series. Taylor & Francis Group. London. 2007. ISBN 0-415-42723-1
2008. 187 s. ISBN 978-80-01-04141-3 - ZÁVODNÍK, P. 2011. Scan to BIM – jednoduchšší přístup k výstupům z laser-scanningu [online, prístupné 23. 5. 2018]
- MIKOLAJ, J. – SCHLOSSER, F. – REMEK, L. – CHYTCAKOVA, A. 2015. Asphalt Concrete Mixtures: Requirements with regard to Life Cycle Assessment. In Advances in Materials Science and Engineering. ISSN 1687-8434, 2015, vol. 2015, Article ID 567238, 7 pages.
- BIM ASOCIÁCIA SLOVENSKO, 2016. Efektívny proces kontroly BIM modelu s využitím laserového skenovania [online, prístupné dňa 24. 9. 2018]
- ŠTRONER, M. – POSPÍŠIL, J. 2008. Terestrické skenovací systémy. 1. vyd. Praha: České vysoké učení v Praze.
- HANZELKOVÁ, A. – KEŘKOVSKÝ, M. 2017. Strategické řízení, 2017. 256 s. ISBN 9788074006371.
The paper is focused on the evaluation of the possibilities using the diagnosis of building objects and outcomes of the mobile 3D scanning process of existing objects and their software transformation using Building Information Modeling (BIM). Emphasis is placed on the creation of building object based on the point cloud determined by 3D mobile mapping. The main objective was to process measured data from mobile mapping, import data into the Autodesk Revit program and create a BIM model. A partial objective was to compare the resulting object originating from the point cloud to the existing project documentation. Conclusion of the paper is evaluating the process through SWOT analysis.